The Medusa Network: a cluster of research centres working on autonomous mobility that is safe, reliable and socially acceptable
4 December 2024.
Autor/es: Luis I. Sánchez Palop, Begoña Mateo Martínez, José Solaz Sanahuja, Elisa Signes Pérez.
Instituto de Biomecánica (IBV)
In recent years, the world of mobility has been the subject of massive innovation aimed at changing the current paradigm. One such innovation is Connected Cooperative Automated Mobility (CCAM), which has been postulated as the future global transport and mobility system.
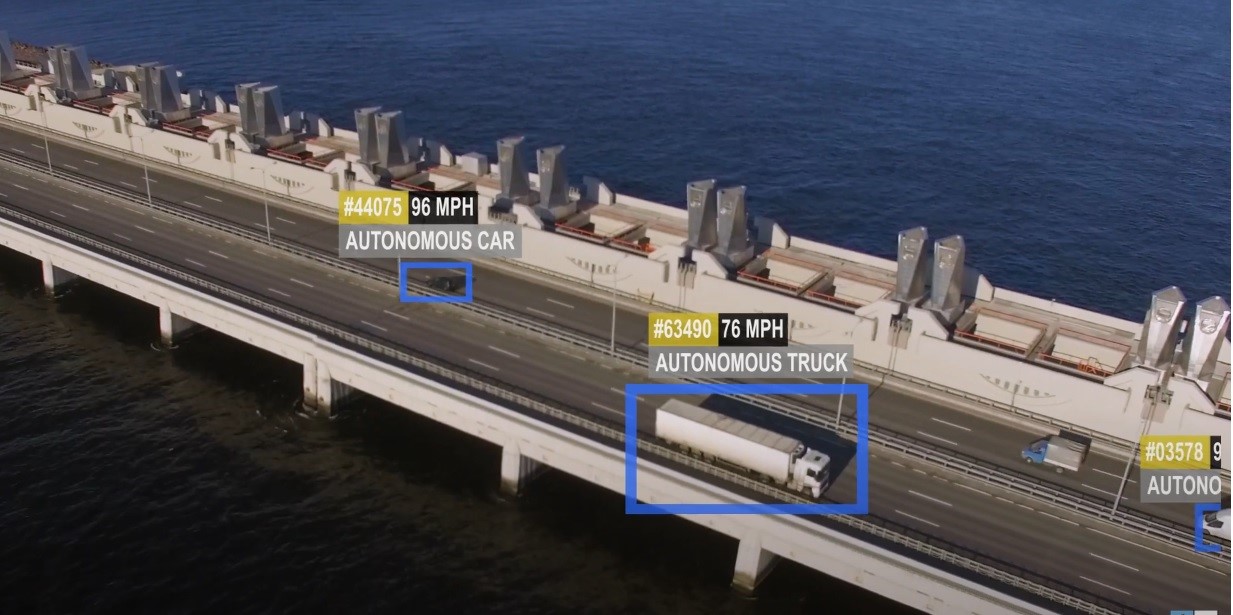
However, the adoption of CCAM depends to a large extent on our ability to overcome significant challenges in terms of its development, both at the technical level and at the level of public perception of the technology, so that it can interact safely with all users of the public highway in the future. In this context, we must be able to anticipate and address ambitious yet realistic traffic scenarios, including mixed traffic, i.e., autonomous and conventional vehicles sharing the same infrastructure.
To this end, autonomous driving technologies will require an advanced decision-making capability based on increased awareness, incorporating information from multiple sources that makes it possible to integrate, above and beyond the perception of the vehicle itself, the state of the driver, the infrastructure, the environment and other road users. Efficient and reliable integration of this information will lead to a collective awareness that will make it possible to ensure the safety and acceptance of the solutions that are developed.
This is the context in which the Medusa Network came into being in October 2023. It is made up of four technology centres from four different parts of Spain: Instituto de Biomecánica (IBV, Valencia), the network leader, CTIC (Asturias), IKERLAN (Basque Country) and TECNALIA (Basque Country). The aim of the Network, which is part of the Cervera Programme for the Generation of Networks of Excellence, is to create synergies among the four centres in the field of intelligent transport, cooperating both in terms of research and in the areas such as training, attracting talent and transferring the results obtained to companies in the sector.
INTRODUCTION
INTELLIGENT TRANSPORT SYSTEMAS (ITS) AND CONNECTED COOPERATIVE AUTOMATED MOBILITY (CCAM)
In recent years, research conducted in the field of Intelligent Transport Systems (ITS) and Connected Cooperative Automated Mobility (CCAM) has significantly impacted the implementation of intelligent solutions for road transport. Numerous control systems have been deployed, albeit in limited operational situations, many of which are based on intelligent control techniques. One of the pioneers in this field was the Google Driverless Car project, later called Waymo, in collaboration with the Artificial Intelligence Laboratory at Stanford. This project has been very relevant recently and has covered more than 35 million kilometres in real-world conditions[1].
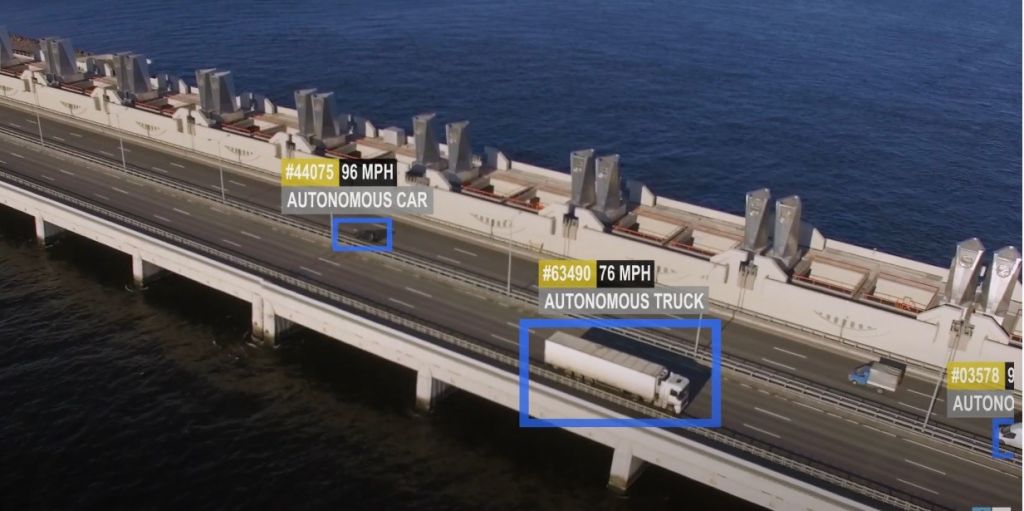
Figure 1: CCAM is focused on mobility, which is connected to infraestructure and vehicles.
The evolution of the technology required to make autonomous and connected vehicles a reality implies that these vehicles must learn from their environment and, at the same time, interact effectively with drivers. In this context, artificial intelligence (AI) technologies play a crucial role in other technological trends, such as the connected world, mass data analysis, artificial vision, and occupant monitoring. A robust and accurate perception of the surrounding environment is essential for highly automated vehicles, allowing reliable information extraction for real-time decision-making. At the same time, driving must be carried out safely and without ambiguity, focusing on the combination of the state of the system, the human being, and the environment.
While progress is being made in the design and deployment of CCAM, doubts have been raised about its acceptance due to the evident complexity and associated risks of this technology, as well as growing scepticism among users regarding its ethical aspects of CCAM[2].
It is in this context of challenge and opportunity that the Medusa Network was born. Over and above any technological considerations, the network has identified safety, reliability and social acceptance of autonomous driving systems as the main challenges[3]. Society is not yet demanding a transition to CCAM mobility, as the implications and potential benefits, such as the increased safety or the reduced environmental impact associated with the integration of CCAM solutions into the mobility system, have yet to be demonstrated, but, given the anticipated advantages, the Medusa network intends to move forward to pave the way for their future incorporation.
DEVELOPMENT
THE MEDUSA NETWORK: HOW TO ADDRESS THE CHALLENGES POSED BY AUTONOMOUS DRIVING AND CCAM IN A COORDINATED WAY
The Medusa Network is made up of four Technology Centres, the IBV, CTIC, IKERLAN and TECNALIA, which bring together a wealth of scientific and technological expertise related to Cervera Technology No. 24 (TC24): Development of digital instrumentation applicable to assisted driving to increase safety through anti-collision sensory systems and intelligent networks (VANET) that include as network nodes vehicles that respond to the challenge of increasing autonomous and self-guided cars.

Figure 2: Medusa Network is a cluster of four centres of excellence.
In this scenario, we must progress in the coordinated development of reliable autonomous driving solutions, with excellence converging in key areas. At the technological level, in line with the goals of the CCAM’s Strategic Agenda for Europe’s Future Transport and Mobility System, essential challenges in terms of technical research and innovation need to be overcome because the highly automated vehicles of tomorrow will be based on advanced ‘feel-think-act’ solutions that will allow them to interact safely with all road users [4].
Vehicle control using intelligent AI-based sensorisation that allows the fusion of different sources must keep pace with the development of reliable hardware and software platforms designed for such a demanding application as autonomous driving. Moreover, it must also be combined with the development of robust and efficient solutions for communicating over mobile networks and handling the data associated with many connected vehicles.
To ensure that this new technology is adopted by society, the technological development must be carried out under the umbrella of excellence and fully account for the human factor (physical, cognitive, emotional and social considerations). In other words, people must be put at the centre of the development process. To achieve this, we need to make progress in applying human-centred development methodologies from a safety perspective, promoting acceptance and trust.
Intending to improve the acceptance of autonomous vehicles, the Medusa Network has set itself two key objectives:
- To integrate and address complex and mixed traffic scenarios, incorporating information about the perception of the vehicle itself, the state of the driver, the infrastructure, the environment and other road users.
- To integrate this information efficiently and reliably to ensure safety and acceptance.
With this in mind, Medusa has based its research priorities on two strategic principles: (1) The alignment and complementarity of the key technologies of the Technology Centres with the TC24 research and development trends, and (2) the promotion of the great technological leap forward of the integrated development of safe and reliable technologies based on digital instrumentation for autonomous and connected driving, with the focus placed firmly on human integration.
These principles will be implemented through virtual validation and demonstration of these technologies, followed by efforts to stimulate the automotive, mobility and institutional sectors and transfer the technologies to them and new stakeholders.
In this regard, the Medusa Network centres contribute their experience and expertise in the four pillars (Figure 3) on which the CCAM proposal for improving mobility is based:
- Vehicle control using AI-based intelligent sensorisation.
- The development of reliable hardware and software platforms for such a demanding application as autonomous driving.
- The development of robust and efficient solutions for communicating over mobile networks and handling the data associated with many connected vehicles.
- The holistic integration of the human factor (physical, cognitive, emotional, and social considerations) from a safety perspective promotes acceptance and trust and progresses design methodologies.

Figure 3: The four pillars of the Medusa Network. Synergies among the four centres of excellence.
THE MEDUSA NETWORK AND THE HUMAN FACTOR.
One of the main reasons why technological innovations fail is that the human factor is not integrated into the design until it is too late. When a design process is not human-centred, we often find that the functionalities developed do not meet the needs of society and lack factors that affect their acceptance. It is, therefore, necessary to define a framework for action that allows for the orderly integration of people in the design of autonomous technologies.
Acceptance of the autonomous car depends on objective safety data and emotional aspects, as shown by European projects sucha as SUaaVE [5], coordinated by the IBV, or DIAMOND [6]. Medusa proposes to improve the acceptance of autonomous vehicles through a passenger-centred design based on the principles of Human-Driven Design (HDD)[7]. The IBV has taken this approach so that it can contribute not only to the challange of achieving the acceptance of the technological solutions developed but also to the challanges posed by human-machine interaction, which, together with acceptance, have been identified in the Strategic Research and Innovation Agenda of the CCAM plaform [8] as key aspects for the implementation fo the autonomous vehicle.
DRIVER MODELS. THE ABILITY TO UNDERSTAND WHAT
The importance of driver models in autonomous vehicle
Suppose we are to incorporate the human factor into the design process. In that case, one of the challenges is to better understand human driving in the context of the new mobility, which will enable the development of human driver models. The usefulness of these models is key to the simulation of more realistic virtual environments and to the design of driver assistance systems in vehicles with a high degree of autonomy, which consider the possible reactions of the driver in situations such as taking control of the car. In this sense, it is interesting to know how users react, both from the driver’s point of view, to better understand how they behave in different circumstances, and from the passenger’s point of view, to adapt the behaviour of the autonomous vehicle so that they do not reject the technology or simply get dizzy.
An HDD approach to driver modelling will allow design criteria to be incorporated into autonomous driving systems to ensure that they behave similarly to a human driver, making them more predictable for other road users. In addition, incorporating this knowledge into simulations and tests during development will enable safe, acceptable and inclusive integration of these vehicles into mixed traffic.
Why do we need to have a better understanding of drivers?
Another key aspect of future vehicles with L3 automation[9] (condition automation, where the driver needs to be ready to intervene but no longer to supervise the driving) is monitoring the state of the driver and passenger. The use of non-invasive, in-vehicle sensorisation will provide insight into the occupants’ physical, mental and emotional state.

Figure 4: Driving automation levels.
At L3 automation levels (Figure 4), knowledge of the driver’s state is key to their ability to take over control of the vehicle safely. The ability to determine their physical and cognitive state – such as their level of attention or fatigue – and their mental state must be considered when designing technology for shared control of the vehicle.
At higher levels of automation, where the role of the driver is secondary, the performance of other types of activities (productive, social or entertainment) will imply a drastic change in the design of the vehicle interior; in this case, the monitoring of the occupant’s state is extended to provide an empathetic and adaptive vehicle interior. The ability to determine the occupants’ physical, cognitive and emotional state makes it possible to optimise the in-vehicle experience and overall user satisfaction, particularly in terms of inclusion, comfort, well-being, privacy and safety.
With this objective in mind, behavioural monitoring, combined with certain physiological aspects, provides valuable information from which a reliable indicator of the internal state can be obtained.
To this end, the IBV will continue to work within the MEDUSA NETWORK and in projects such as BERTHA[10] on the models to characterise the emotional and mental state of the passenger based on physiological signals. the aim is to detect key negative states (stress, fatigue, etc.) and key positive states (enjoyment, calm, etc.) in quasi-real time in a mnimally invasive manner and to seek a sensor-independent solution.
DRIVING LABORATORY. A REALISTIC AND SAFE WAY TO TEST NEW DEVELOPMENTS
On the other hand, something that may limit the integration of the human factor is the fact that it is possible to perform and carry out tests that are realistic but, at the same time, do not pose a risk to the user. There are clear limitations when testing technical developments in a fully automated vehicle in a real environment (safety, cost and the technical complexity of transferring such developments to an actual vehicle). However, using reliable and immersive autonomous vehicle simulators, combined with on-road testing (in controlled conditions), will make it possible to create near-reality conditions to overcome this limitation and potentially handle dangerous situations.
With this in mind, the IBV has developed the Human Autonomous Vehicle (HAV). This complete laboratory includes a dynamic driving simulator that not only emulates the behaviour of vehicles with different degrees of autonomy but also makes it possible to acquire physiological and cerebral variables of the driver/passenger and to extract vehicle telemetry, etc. (Figure 5). In short, it makes it possible to obtain a wide range of parameters related to human behaviour in synchronisation with the simulated driving scenario. This laboratory also includes the behavioural models developed by the IBV, which make it possible to detect the emotions of the occupants in real-time and to analyse the requirements of the monitoring and user information systems right from the initial design phases.

Figure 5: HAV. Human Automated Vehicle, the IBV’s driving laboratory.
CONCLUSIONS
As stated throughout this article, CCAM autonomous driving is fast becoming a reality. However, the challenges associated with its implementation are by no means trivial and require significant advances, both in purely technological terms and in terms of reliability and ethical considerations, to ensure its acceptance by the public.
The Medusa Network is determined to make progress in overcoming these challenges by working on intelligent vehicle and infrastructure sensitisation, improving communications and data management, and developing reliable hardware and software platforms, all through the prism of the Human Factor, i.e., putting people at the centre of the developments.
This approach, which the Instituto de Biomecánica (IBV) applies to all its projects, is the path we must follow to accelerate the adoption of the new mobility model, the CCAM, whose benefits in terms of safety and efficiency will have a significant and positive impact on the society of tomorrow.
AGRADECIMIENTOS
Our thanks to the partners in the Medusa Network, the CTIC, IKERLAN and TECNALIA technology centres.
Project (CER-20231011) recognised as a CERVERA Network of Excellence, financed by the Ministry of Science, Innovation and Universities through the Centre for Technological Development and Innovation E.P.E. (CDTI), under the European Union’s Recovery and Resilience Mechanism (RRM).
BIBLIOGRAPHY
[1] https://waymo.com/intl/es/safety/impact/#methodology
[2] Bonnefon, J. F., Shariff, A., & Rahwan, I. (2016). The social dilemma of autonomous vehicles. Science, 352(6293), 1573-1576.
[3] European Commission (2013). Options for strengthening responsible research and innovation.
[4] Connected Cooperative Automated Mobility Partnership (2022) CCAM Strategic Research and Innovation Agenda (2022)
[5] SuaaVE project – Colouring automated driving with human emotions: https://www.suaave.eu
[6] DIAMOND project – Revealing actionable knowledge from data: https://diamond-project.eu/
[7] Niemelä, M., Ikonen, V., Leikas, J., Kantola, K., Kulju, M., Tammela, A., & Ylikauppila, M. (2014). Human-driven design: a human-driven approach to the design of technology. In ICT and Society: 11th IFIP TC 9 International Conference on Human Choice and Computers, HCC11 2014, Turku, Finland, July 30–August 1, 2014. Proceedings 11 (pp. 78-91). Springer Berlin Heidelberg.
[8] https://www.ccam.eu/what-is-ccam/governance/ccam-states-representatives-group/
[9] SAE J3016™ Recommended Practice: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles
[10] BERTHA project – Behavioural ReplicaTion of Human drivers for CCAM: https://berthaproject.eu/
AFFILIATION OF AUTHORS
Instituto de Biomecánica de Valencia
Universitat Politècnica de València
Edificio 9C. Camino de Vera s/n
(46022) Valencia. Spain