Red Medusa: una agrupación de centros de investigación para una movilidad autónoma segura, confiable y con aceptación social
2 diciembre 2024.
Autor/es: Luis I. Sánchez Palop, Begoña Mateo Martínez, José Solaz Sanahuja, Elisa Signes Pérez.
Instituto de Biomecánica (IBV)
El mundo de la movilidad está viviendo en estos últimos años grandes innovaciones que se encaminan a cambiar el paradigma actual. Dentro de estas innovaciones se sitúa la Movilidad Autónoma Conectada y Cooperativa (CCAM, de sus siglas en inglés Connected Cooperative Automated Mobility), que se presenta como el futuro sistema de transporte y movilidad mundial.
Sin embargo, la adopción de CCAM depende en gran medida de superar importantes retos en su desarrollo, tanto a nivel técnico como a nivel de percepción de la población, permitiendo una futura interacción segura con todos los usuarios de la vía. En este sentido, es crucial ser capaces de plantear y abordar escenarios de tráfico ambiciosos pero realistas, incluyendo el tráfico mixto, con vehículos autónomos y vehículos convencionales conviviendo en la misma infraestructura.
Para ello, las tecnologías de conducción autónoma requerirán una toma de decisiones avanzada basada en una mayor conciencia, incorporando información de múltiples fuentes que permitan integrar, más allá de la percepción del propio vehículo, el estado del conductor, de la infraestructura, del entorno y de otros usuarios de la carretera. La integración eficiente y confiable de esta información conducirá a una conciencia colectiva que permita asegurar la seguridad y aceptación de las soluciones desarrolladas.
Es en este contexto en el que nace en octubre de 2023 la Red Medusa, formada por cuatro centros tecnológicos de distintos puntos de España: Instituto de Biomecánica (IBV, Valencia), líder de la red, CTIC (Asturias), IKERLAN (País Vasco) y TECNALIA (País Vasco). El objetivo de la Red, que se enmarca dentro del Programa Cervera para la generación de Redes de Excelencia, es la generación de sinergias entre los cuatro centros dentro del ámbito del transporte inteligente, cooperando tanto en las actividades de investigación y desarrollo como en labores de formación, captación de talento y transferencia de los resultados obtenidos a las empresas del sector.
INTRODUCCIÓN
SISTEMAS DE TRANSPORTE INTELIGENTES (SIT) Y MOVILIDAD AUTOMATIZADA CONECTADA Y COOPERATIVA (CCAM)
En los últimos años, las investigaciones realizadas en el ámbito de los Sistemas de Transporte Inteligente (SIT) y los Vehículos Automatizados Conectados y Cooperativos (CCAM) han tenido un impacto significativo en la implementación de soluciones inteligentes en el transporte por carretera. En la actualidad, se han desplegado numerosos sistemas de control en situaciones operativas limitadas, muchos de los cuales se basan en técnicas de control inteligente. Uno de los pioneros en este campo fue el proyecto Google Driverless Car, posteriormente conocido como Waymo, en colaboración con el Laboratorio de Inteligencia Artificial de Stanford. Este proyecto ha tenido gran relevancia en los últimos años al recorrer más de 35 millones de kilómetros en entornos reales[1].
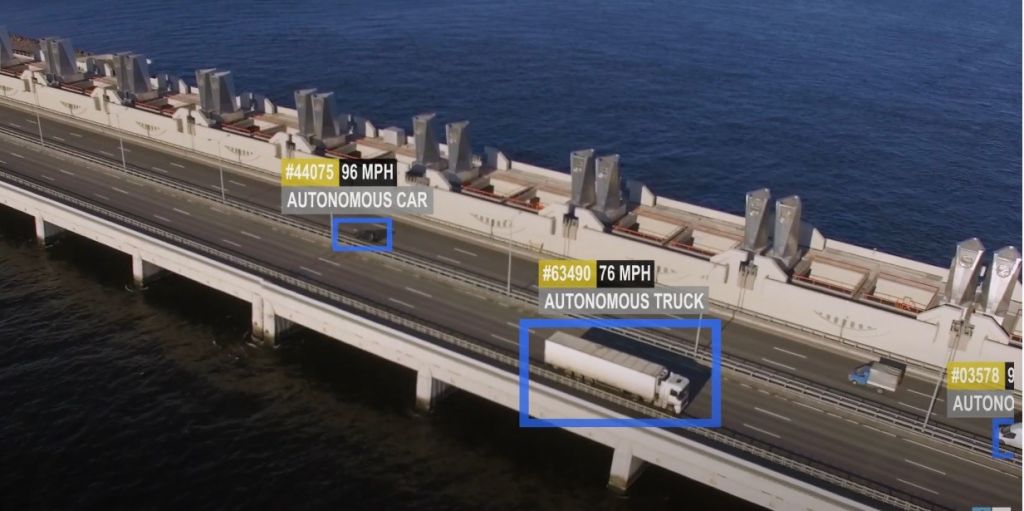
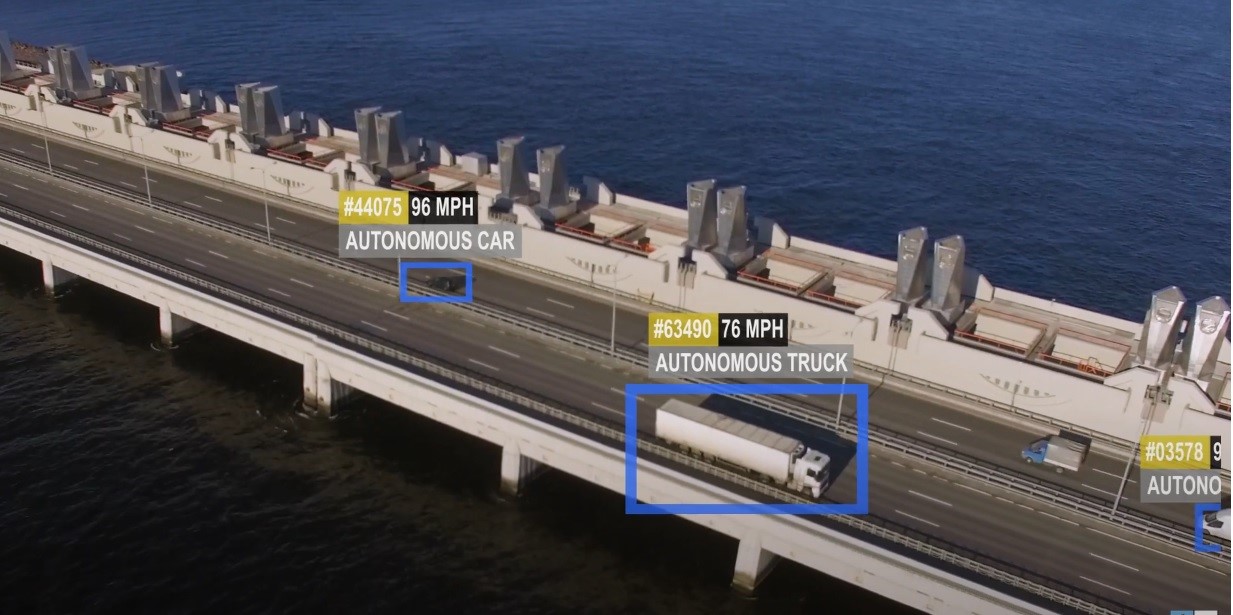
Figura 1: CCAM, por una movilidad en la que infraestructura y vehículos están conectados.
La evolución de la tecnología para lograr vehículos autónomos y conectados implica que estos vehículos deben aprender de su entorno y, al mismo tiempo, interactuar de manera efectiva con los conductores. En este contexto, las tecnologías de Inteligencia Artificial (IA) desempeñan un papel crucial y se entrelazan con otras tendencias tecnológicas como el mundo conectado, el análisis de datos masivos, la visión artificial y la monitorización del ocupante. Una percepción del entorno robusta y precisa es absolutamente esencial para los vehículos altamente automatizados, permitiendo la extracción de información confiable para la toma de decisiones en tiempo real durante la conducción, que debe realizarse de manera segura y sin ambigüedades, centrada en la combinación del estado del sistema, del humano y del entorno.
Mientras se avanza en el diseño y despliegue tecnológico del CCAM, su aceptación se ha puesto en duda debido a la evidencia de la complejidad y los riesgos asociados de esta tecnología, así como al aumento del escepticismo de los usuarios sobre los aspectos éticos de CCAM[2].
En este contexto, de retos y oportunidades, nace la Red Medusa, que identifica como los mayores retos, más allá de los aspectos tecnológicos, la seguridad, confiabilidad y aceptación social de los sistemas de conducción autónoma[3]. La sociedad aún no exige la transición a la movilidad CCAM, ya que las implicaciones y beneficios potenciales, como una mayor seguridad o un menor impacto medioambiental de la integración de soluciones CCAM en el sistema de movilidad aún están por demostrar, pero, dadas las ventajas que supone, desde la red Medusa se pretende avanzar para allanar el camino para su futura incorporación.
DESARROLLO
RED MEDUSA: CÓMO ABORDAR DE FORMA COORDINADA LOS RETOS DE LA CONDUCCIÓN AUTÓNOMA Y CCAM
La Red Medusa está formada por cuatro Centros Tecnológicos, IBV, CTIC, IKERLAN y TECNALIA, que reúnen una gran capacidad científico tecnológica relacionada con la Tecnología Cervera nº24 (TC24): Desarrollo de instrumentación digital aplicable a la conducción asistida para el aumento de la seguridad mediante sistemas sensoriales anticolisión y redes inteligentes (VANET) que incluyan como nodos de red a los vehículos y que respondan al reto de incremento de vehículos autónomos y auto guiados.

Figura 2: Red Medusa, una agrupación de cuatro centros excelentes.
En este escenario se hace necesario un avance en el desarrollo coordinado de soluciones fiables para la conducción autónoma, donde confluya la excelencia en áreas clave. A nivel tecnológico, según los objetivos de la agenda estratégica de la CCAM para el futuro sistema de transporte y movilidad de Europa, se deben superar importantes desafíos de investigación técnica e innovación, ya que los vehículos altamente automatizados del mañana se basarán en soluciones avanzadas para ‘sentir-pensar-actuar’, lo que permitirá una interacción segura con todos los usuarios de la carretera[4].
El control del vehículo mediante sensorización inteligente basada en inteligencia artificial (IA) que permita la fusión de diferentes fuentes deberá de estar en línea con el desarrollo de plataformas hardware y software confiables para una aplicación tan exigente como es la conducción autónoma. Además, se deberá combinar con el desarrollo de soluciones robustas y eficientes para la comunicación mediante redes móviles y para gestión de los datos asociada a un alto número de vehículos conectados.
Para asegurar la adopción de esta nueva tecnología por parte de la sociedad en su conjunto el desarrollo tecnológico deberá realizarse bajo el paraguas de la excelencia en la inclusión del factor humano de forma completa (física, cognitiva, emocional y social), es decir, poner a la persona en el centro del proceso de desarrollo. Para lograrlo, se necesita avanzar en la aplicación de metodologías de desarrollo centrado en la persona desde el punto de vista de la seguridad, fomento de aceptabilidad y confianza.
Con la finalidad de mejorar la aceptabilidad del vehículo autónomo la Red Medusa se ha marcado dos objetivos clave:
- Integrar y abordar escenarios de tráfico complejos y mixtos, incorporando información de la percepción del propio vehículo, el estado del conductor, de la infraestructura, del entorno y de otros usuarios.
- La integración eficiente y confiable de esta información, que permita asegurar la seguridad y la aceptación.
Bajo estas premisas, se ha diseñado el eje de la actividad investigadora de Medusa, en base a dos principios estratégicos: (1) el alineamiento y complementariedad de las tecnologías clave de los Centros Tecnológicos con las tendencias de investigación y desarrollo en el área de la TC24, y (2) impulsar el gran salto tecnológico del desarrollo integrado de tecnologías seguras y confiables basadas en instrumentación digital para la conducción autónoma y conectada, poniendo el foco en la integración de las personas.
Estos principios se llevarán a cabo a través de procesos de validación virtual y demostración de esas tecnologías, teniendo como resultado una labor de dinamización y transferencia a los sectores de automoción, movilidad e instituciones y nuevos actores implicados.
En este sentido, los centros de la Red Medusa aportan su experiencia y conocimiento en los 4 pilares (figura 3) sobre los que se sustenta la propuesta de mejora de la movilidad CCAM:
- Control del vehículo mediante sensorización inteligente basada en Inteligencia Artificial (IA)
- Desarrollo de plataformas hardware y software confiables para una aplicación tan exigente como es la conducción autónoma.
- Desarrollo de soluciones robustas y eficientes para la comunicación mediante redes móviles y para la gestión de los datos asociada a un alto número de vehículos conectados.
- Inclusión del Factor Humano de forma holística (física, cognitiva, emocional y social) desde el punto de vista de la seguridad, fomento de la aceptabilidad y confianza avanzando en las metodologías de diseño.

Figura 3: Los cuatro pilares de la Red Medusa. Sinergias entre cuatro centros excelentes.
LA RED MEDUSA Y EL FACTOR HUMANO.
Una de las principales razones por las que las innovaciones tecnológicas fracasan es debido a una tardía incorporación del factor humano en el diseño. Cuando las personas no son el centro del proceso de diseño, es fácil que las funcionalidades desarrolladas no respondan a las necesidades de la sociedad y los factores que afectan a su aceptación. Por tanto, se hace necesaria la definición de un marco de actuación que permita de manera ordenada la inclusión de la persona en el diseño de las tecnologías autónomas.
La aceptación del coche autónomo depende firmemente, no solo de datos objetivos relacionados con la seguridad, sino de aspectos emocionales, como han demostrado proyectos europeos como SUaaVE[5], coordinado por IBV, o DIAMOND[6]. Medusa propone mejorar la aceptación de los vehículos autónomos siguiendo un diseño centrado en el pasajero, basado en los principios de Human-driven Design (HDD)[7]. Desde el IBV se ha apostado por este enfoque con el objetivo no sólo contribuir al reto de conseguir la aceptación de las soluciones tecnológicas desarrolladas, sino ayudar a afrontar los retos de la interacción persona-máquina que, junto con la aceptación, han sido identificados en la agenda estratégica de investigación e innovación de la plataforma CCAM[8] como aspectos clave para la implementación del vehículo autónomo.
MODELOS DE CONDUCTOR. PODER ENTENDER QUÉ SIENTE Y CÓMO SE COMPORTA EL USUARIO
La importancia de los modelos del conductor en vehículos autónomos
Para incluir el factor humano en el diseño, uno de los retos es comprender mejor la conducción humana en el contexto de la nueva movilidad, lo que va a permitir el desarrollo de los modelos de conductor humano. La utilidad de estos modelos es clave en la simulación de entornos virtuales más realistas y en la concepción de sistemas de ayuda a la conducción en vehículos con elevado grado de autonomía que comprendan las posibles reacciones del conductor en situaciones, por ejemplo, de retoma de control. En este sentido, interesa conocer cómo reaccionan los usuarios tanto desde el punto de vista de conducción, ayudando a comprender mejor el comportamiento ante diferentes eventos, como del pasajero, para poder adaptar el comportamiento del vehículo autónomo evitando rechazo de la tecnología o, simplemente, mareos.
Modelar al conductor desde un enfoque HDD permitirá la incorporación de criterios de diseño a los sistemas de conducción autónoma, haciéndolos más similares al comportamiento de un conductor humano y, por tanto, más predecibles por el resto los usuarios de la vía. Además, la incorporación de este conocimiento a las simulaciones y ensayos durante su desarrollo permitirá una incorporación segura, aceptable e inclusiva de estos vehículos al tráfico mixto.
¿Por qué entender mejor al conductor?
Otro aspecto fundamental en los futuros vehículos con automatización L3[9] (automatización condicionada, en la que el conductor ha de estar preparado para intervenir, pero ya no necesita supervisar la conducción) es monitorizar el estado del conductor y pasajero. El uso de una sensorización no invasiva en el interior del vehículo permitirá conocer el estado físico, mental y emocional de los ocupantes.

Figura 4: Niveles de automatización de la conducción.
En niveles de automatización L3 (Figura 4), conocer el estado del conductor es un aspecto fundamental a la hora de retomar el control de manera segura. Conocer su estado físico y cognitivo como nivel de atención o fatiga, así como estado mental debe ser tenido en cuenta a la hora de diseñar la tecnología para un control compartido del vehículo.
En niveles de automatización mayores, donde el rol de conductor queda en segundo plano, la realización de otro tipo de actividades (productivas, sociales o de entretenimiento) se verá acompañado de un cambio drástico en el diseño del interior de vehículo; en este caso, la monitorización del estado de los ocupantes se amplía para ofrecer un interior del vehículo empático y adaptativo. Conocer el estado físico, cognitivo y emocional de los ocupantes permite optimizar la experiencia a bordo y la satisfacción general de los usuarios, particularmente en términos de inclusión, comodidad, bienestar, privacidad y seguridad.
Con este objetivo, la monitorización del comportamiento, combinada con aspectos fisiológicos aporta una información valiosa a la hora de obtener un indicador confiable del estado interno.
Para ello, el IBV va a continuar trabajando dentro del marco de la RED MEDUSA y en proyectos como BERTHA[10] en los modelos de caracterización del estado emocional y mental del pasajero basados en la señal fisiológica. El objetivo es lograr detectar estados clave negativos (estrés, fatiga, etc.) y positivos (disfrute, calma, etc.) en tiempo cuasi-real, de forma mínimamente invasiva y buscando una solución independiente del sensor.
LABORATORIO DE CONDUCCIÓN. UNA FORMA REALISTA Y SEGURA PARA TESTAR NUEVOS DESARROLLOS
Por otra parte, una limitación para la inclusión del factor humano es la posibilidad de realizar tests que sean realistas, pero al mismo tiempo no presenten ningún riesgo para el usuario. Obviamente, existe una clara limitación a la hora de experimentar los desarrollos técnicos en un vehículo totalmente automatizado (seguridad, coste y complejidad técnica de trasladar dichos desarrollos a un vehículo real) en un entorno real. Sin embargo, el uso de simuladores de vehículos autónomos confiables e inmersivos, combinados con pruebas en carretera (en condiciones controladas), permitirá crear condiciones cercanas a la vida real para superar esta limitación y tratar potencialmente situaciones peligrosas.
En este sentido, el IBV ha desarrollado Human Autonomous Vehicle (HAV), un completo laboratorio que incluye un simulador dinámico de conducción que permite, al mismo tiempo que emula el comportamiento de vehículos de distintos grados de autonomía, captar variables fisiológicas y cerebrales del conductor/pasajero, extraer la telemetría del vehículo, etc (figura 5). En resumen, permite obtener una gran variedad de parámetros relacionados con la conducta humana y, además, de forma sincronizada con el escenario de conducción que se está simulando. Este laboratorio incluye también los modelos de comportamiento desarrollados por el IBV, por lo que permite detectar, en tiempo real, las emociones de los ocupantes, analizando, desde las fases iniciales de diseño, qué requisitos han de cumplir los sistemas de monitorización y de información para el usuario.

Figura 5: HAV. Human Automated Vehicle, el laboratorio de conducción desarrollad por el IBV
CONCLUSIONES
Como se ha detallado a lo largo del artículo, la conducción autónoma CCAM es una realidad cada vez más cercana. Sin embargo, los retos que presenta para su implantación no son triviales y requieren de importantes avances, tanto puramente tecnológicos como de confiabilidad y consideraciones éticas para asegurar su aceptación por el público.
La Red Medusa busca precisamente avanzar en la consecución de estos retos, trabajando en la sensorización inteligente de vehículos e infraestructura, la mejora de las comunicaciones y gestión de datos y el desarrollo de plataformas de hardware y software confiable, todo ello desde el prisma del Factor Humano, poniendo a la persona en el centro de los desarrollos.
Este enfoque, que el Instituto de Biomecánica (IBV) imprime en todos sus proyectos, es el camino a seguir para acelerar la adopción del nuevo modelo de movilidad, CCAM, cuyos beneficios en términos de seguridad y eficiencia tendrán un gran impacto positivo en la sociedad del mañana.
AGRADECIMIENTOS
A los socios de la Red Medusa, los centros tecnológicos CTIC, IKERLAN y TECNALIA.
Proyecto (CER-20231011) reconocido como Red de Excelencia CERVERA, financiado por el Ministerio de Ciencia, Innovación y Universidades a través del Centro para el Desarrollo Tecnológico y la Innovación E.P.E.(CDTI), con cargo al Mecanismo de Recuperación y Resiliencia (MRR) de la Unión Europea.
BIBLIOGRAFÍA
[1] https://waymo.com/intl/es/safety/impact/#methodology
[2] Bonnefon, J. F., Shariff, A., & Rahwan, I. (2016). The social dilemma of autonomous vehicles. Science, 352(6293), 1573-1576.
[3] European Commission (2013). Options for strengthening responsible research and innovation.
[4] Connected Cooperative Automated Mobility Partnership (2022) CCAM Strategic Research and Innovation Agenda (2022)
[5] SuaaVE project – Colouring automated driving with human emotions: https://www.suaave.eu
[6] DIAMOND project – Revealing actionable knowledge from data: https://diamond-project.eu/
[7] Niemelä, M., Ikonen, V., Leikas, J., Kantola, K., Kulju, M., Tammela, A., & Ylikauppila, M. (2014). Human-driven design: a human-driven approach to the design of technology. In ICT and Society: 11th IFIP TC 9 International Conference on Human Choice and Computers, HCC11 2014, Turku, Finland, July 30–August 1, 2014. Proceedings 11 (pp. 78-91). Springer Berlin Heidelberg.
[8] https://www.ccam.eu/what-is-ccam/governance/ccam-states-representatives-group/
[9] SAE J3016™ Recommended Practice: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles
[10] BERTHA project – Behavioural ReplicaTion of Human drivers for CCAM: https://berthaproject.eu/
AFILIACIÓN DE LOS AUTORES
Instituto de Biomecánica de Valencia
Universitat Politècnica de València
Edificio 9C. Camino de Vera s/n
(46022) Valencia. Spain